When the first Corvette rolled out of a Flint, Michigan assembly line in June 1953, it had exactly one job: go fast and look good doing it. Back then there were no traction control, no stability management, no driver-assistance systems of any kind. Just a straight-six engine, a two-speed automatic transmission, and a fiberglass body that turned heads from coast to coast. If you wanted the car to do something, you did it yourself.
Seventy-plus years later, the 2026 Corvette ZR1X packs 1,250 horsepower, a hybrid all-wheel-drive system, and enough onboard computing power to make decisions faster than any human foot or hand ever could. The machine still turns heads but the thing separating it from that 1953 roadster isn’t just power or technology, it’s the fundamental question of who, or what, is actually driving.
That shift is what the automotive industry now calls the software-defined vehicle where software, not hardware, governs how the car behaves. The Corvette got there the way it does everything, by pushing harder than anyone thought was necessary.
The Analog Era: Pure Machine, Pure Driver (1953–1981)

The C1 Corvette was an honest machine in the way that only analog things can be. Every input from the driver translated directly to a mechanical output. There was no intermediary, interpretation, or electronic buffer between the steering wheel and the road. You were the computer.
That started to change in 1957, when Zora Arkus-Duntov and his team introduced the Rochester Ramjet fuel injection system as an option on the C1. It was the first time a Corvette tried to manage fuel delivery with anything approaching precision, and it earned the car its legendary “Fuelie” nickname. It also made the 283 cubic-inch V8 one of the first high-volume American production engines to hit one horsepower per cubic inch, a milestone that ended up in Chevrolet’s marketing copy for years.
But here’s the important caveat: the Ramjet wasn’t electronic. It worked through vacuum signals and mechanical pressure, with no microchip or circuit board involved. It was an ingenious piece of engineering, but it was still physics, not computation. After 1965, it disappeared entirely, and the Corvette went back to carburetors for the next 17 years.
The First Computer under the Hood: The 1982 C3 (1981–1982)
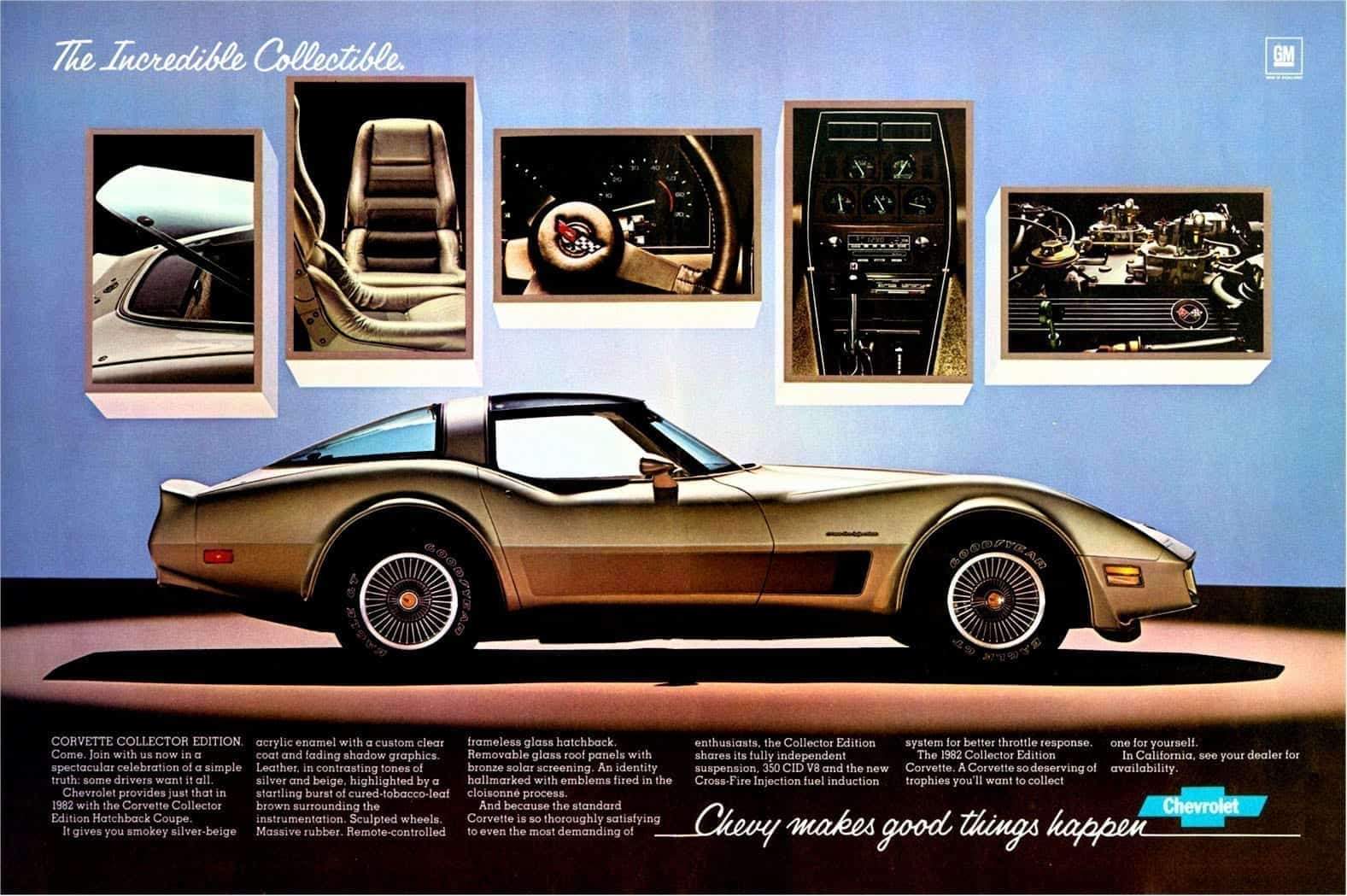
The gap between the Ramjet and what came next was long enough that most people forgot fuel injection had ever been on a Corvette at all. Then came 1981, and with it, something genuinely new: Computer Command Control, the first time an Engine Control Module showed up in a Corvette, using sensors to read fuel, spark, temperature and other engine data in real time.
A year later, the final C3 introduced Cross-Fire Injection, two throttle body injectors governed by that ECM, responding to live signals from the engine. It was the first production Corvette “fuelie” since 1965, and more importantly, it was the first Corvette where a computer was making decisions.
The C3 Corvette ended its 15-year run by planting the seed of everything that followed. That feels right. It was ahead of its time in 1957 with mechanical injection and ahead of its time again in 1982 by “handing the keys” to a machine.
The Long March: Electronics Take Over (C4 through C7, 1984–2019)

What happened across the next four generations wasn’t a single breakthrough. It was a steady accumulation of control transferred from driver to software, generation by generation, almost without anyone noticing. The C4 Corvette brought Tuned Port Injection and a more sophisticated ECM. The C5 introduced the LS1 and gave the car its modern performance identity, alongside standard ABS and traction control.

The C6 added Magnetic Ride Control, a suspension system that reads road conditions and adjusts damping in real time, thousands of times per second. The C7 wrapped it all together with fully configurable drive modes that simultaneously remap throttle response, suspension behavior, steering weight and transmission logic at the press of a button.
By the time the C7 bowed out, the Corvette driver wasn’t really operating a mechanical system anymore. They were choosing parameters and letting software execute them. Nobody called it a software-defined car yet but that’s what it was becoming.
The E-Ray: The Bridge Car (2024)

The C8 E-Ray didn’t get the same press as the Z06 or ZR1, but it deserves more credit than it gets. It was the first AWD Corvette in history, and the way it achieved that distinction matters enormously for the story. There’s no mechanical connection between the front electric motor and the rear V8. Two completely separate power sources, spinning two completely separate axles, with software as the only thing coordinating between them.
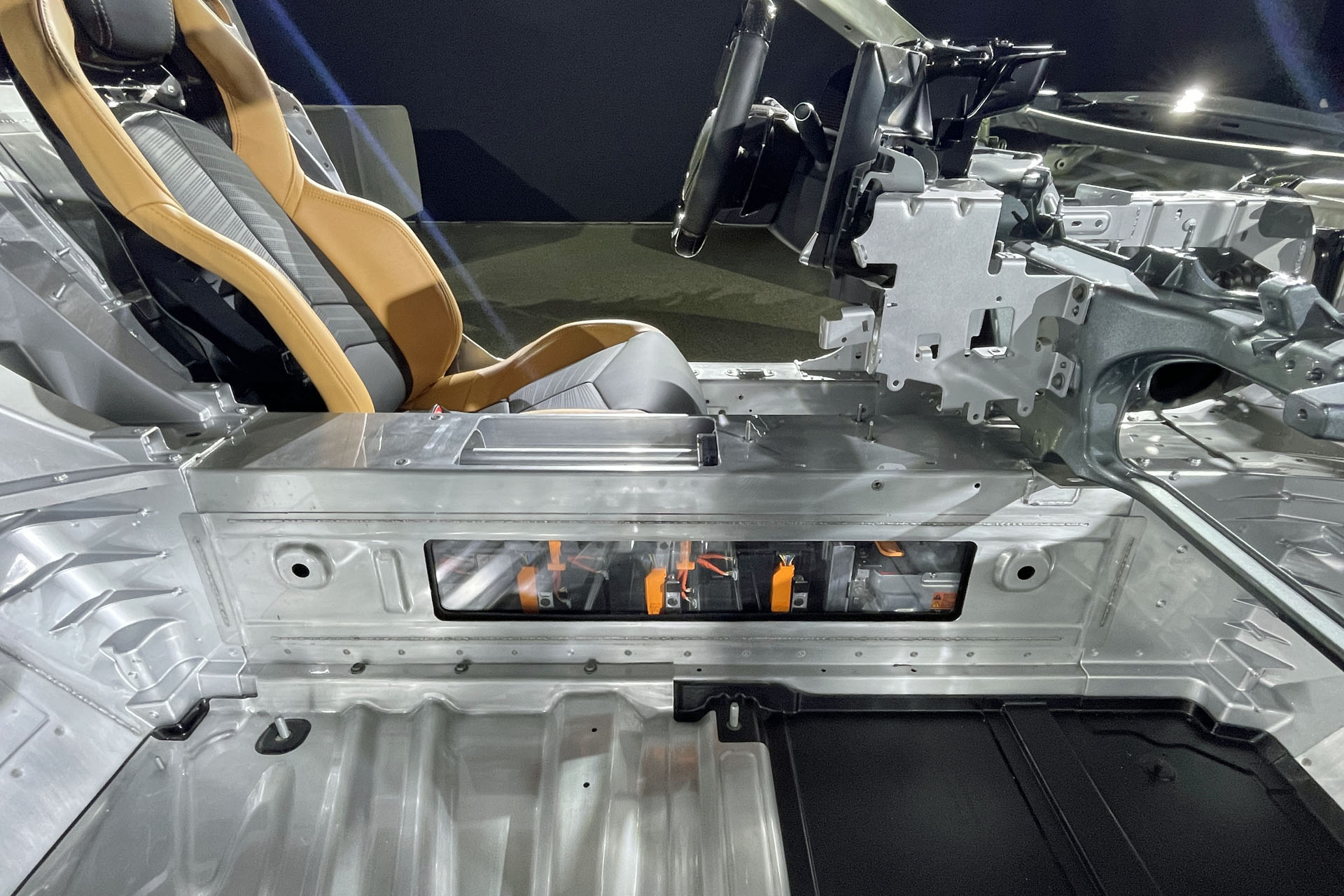
Every time you accelerate, brake or turn, the car’s control systems are reading your inputs and the road conditions simultaneously, deciding in milliseconds how much torque goes where. That’s not a driver doing the computing anymore, that’s the car. And that distinction is exactly what makes the E-Ray the first Corvette that qualifies as a true software-defined car.
The ZR1X: Where Software Becomes the Car (2026)

The 2026 ZR1X takes everything the E-Ray established and turns it up to a level that makes the original C1 feel like it belongs in a museum of primitive tools (which, to be fair, it does).The numbers are staggering: 1,064 horsepower from the twin-turbo LT7 V8, another 186 from the front electric motor, 1,250 combined, zero to 60 in under two seconds.
But the numbers aren’t actually the most interesting thing about this car. The most interesting thing is Stealth Mode, where the V8 goes completely silent and the ZR1X ghosts along on electric power alone. Or Flying Start Mode, which transitions from that whisper-quiet EV operation to full twin-turbo fury without a single interruption in acceleration. Or the Charge+ track performance settings like Endurance, Qualifying, or Push-to-Pass, which adjust how the battery stores and deploys energy based on how long you plan to keep lapping. These aren’t features in the traditional sense but more like “software behaviors” if you will.
What Software Controls in the E-Ray and ZR1X
| System | Models | How software controls it | What the driver feels |
| eAWD Torque Distribution | E-Ray & ZR1X | Continuously reads wheel slip, throttle position and road conditions to blend power between the front electric motor and the rear V8 in real time, with no physical connection between the two axles. | Instant, linear acceleration with no wheelspin on launch. The car hooks up and pulls rather than clawing for grip. |
| Regenerative Brake Torque Vectoring | E-Ray & ZR1X | During cornering and braking, the front motor recovers energy while the system adjusts brake bias to keep the car balanced and stable through the arc. | Neutral, planted handling under trail braking. The car tightens its line instead of pushing wide. |
| Front Axle Pre-Control | ZR1X only | Operating under the PTM Pro system, it actively manages inside front brake pressure in the milliseconds before corner exit, preventing wheel flare when full throttle is applied while the steering is still turned. | Crisp, immediate response on corner exit. Power goes to the road instead of spinning the inside wheel. |
| Driver Mode Selector | E-Ray & ZR1X | A single mode selection simultaneously remaps throttle response curves, suspension damping rates, steering weight, stability control thresholds and transmission shift points across the entire car. | The car feels like a fundamentally different machine in Tour versus Track. Same hardware, completely different personality. |
| Stealth Mode | E-Ray & ZR1X | Suppresses the combustion engine entirely, routing all propulsion through the front electric motor only, up to 45 mph for approximately 5 miles. | Silent, smooth progress with no engine noise or vibration, useful for early morning starts or quiet neighborhoods. |
| Flying Start Mode | ZR1X only | Manages the handoff from electric-only to full V8 operation, coordinating clutch engagement, torque fill and AWD bias so the transition is seamless under hard acceleration. | Uninterrupted pull from rest to top speed with no lag, lurch or flat spot during the power source transition. |
| Launch Control | ZR1X only | Controls clutch engagement rate, front/rear torque split and throttle mapping from a standing start, with customizable settings for different track surfaces and conditions. | Maximum, repeatable acceleration off the line. The sub-2-second 0-60 time is a software achievement as much as a mechanical one. |
| Predictive Energy Management | ZR1X only | Charge+ and Endurance modes adjust battery storage strategy based on track session length and driver preferences, prioritizing either peak bursts of electric power or consistent eAWD output over a full fuel tank. | Consistent hybrid performance over an extended track session rather than depleted electric output after the first few laps. |
Seven Decades, One Through-Line

From Zora Arkus-Duntov chasing one horsepower per cubic inch with a mechanical injection system, to an ECM making its first hesitant decisions in a 1982 C3, to magnetic suspension reading the road thousands of times a second, to software arbitrating 1,250 horsepower between two axles in real time: the Corvette has always been whatever was most advanced about its era.